Automatic Preparation Before Competition For Soccor Robot
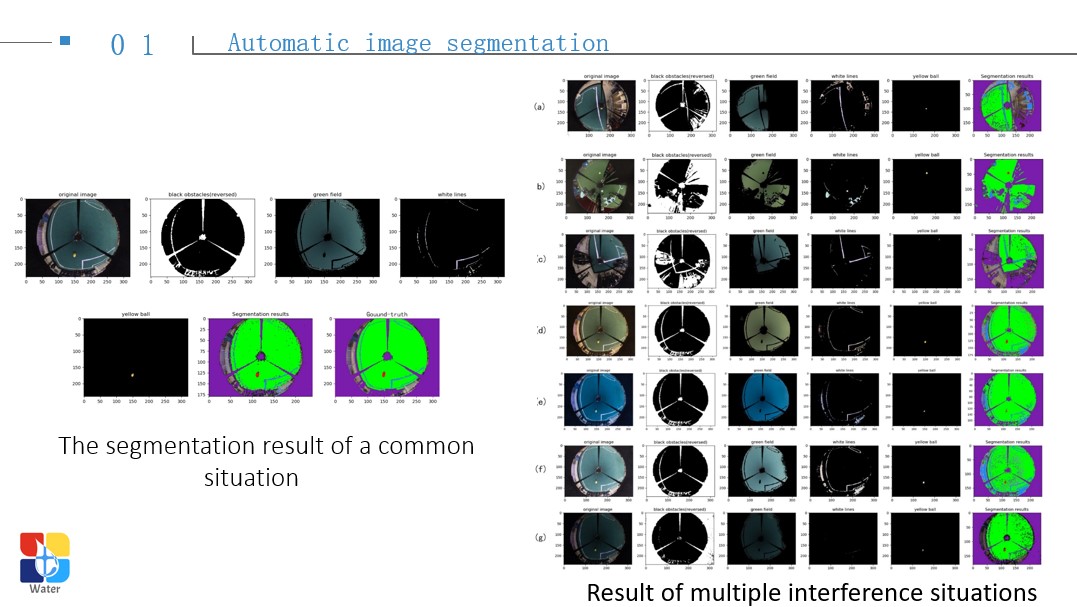
We proposed an adaptive image segmentation method based on HSI color space, which can be used for object identification in robot soccer games. This method requires no human intervention, and can guarantee the real-time performance and stability of segmentation to cope with the high real-time requirement and uneven illumination in the competition
Our team got ROBOCUP 2019 2nd prize.
The paper of this work is here.
The slides of this work is here.
Our method is not to focusing on the shape or edge features, but to take advantage of characteristics in histograms in different color spaces to approach segmentation for one frame image. The range value of each pixels in HSI color space is obtained from the segmentation result, then the range value can be used to segment the subsequent images in a high real-time situation. The results shows our method has highly accuracy and stability in most of situations.
we proposed method to measure and correct parameters more accurately and conveniently. We put lights on the floor at a fixed distance and had the robot rotate at a constant speed, recording parameters of 360 degrees. The light belt is very bright and easy to identify, and as it rotates, the robot can identify and record the positions of these points of light.
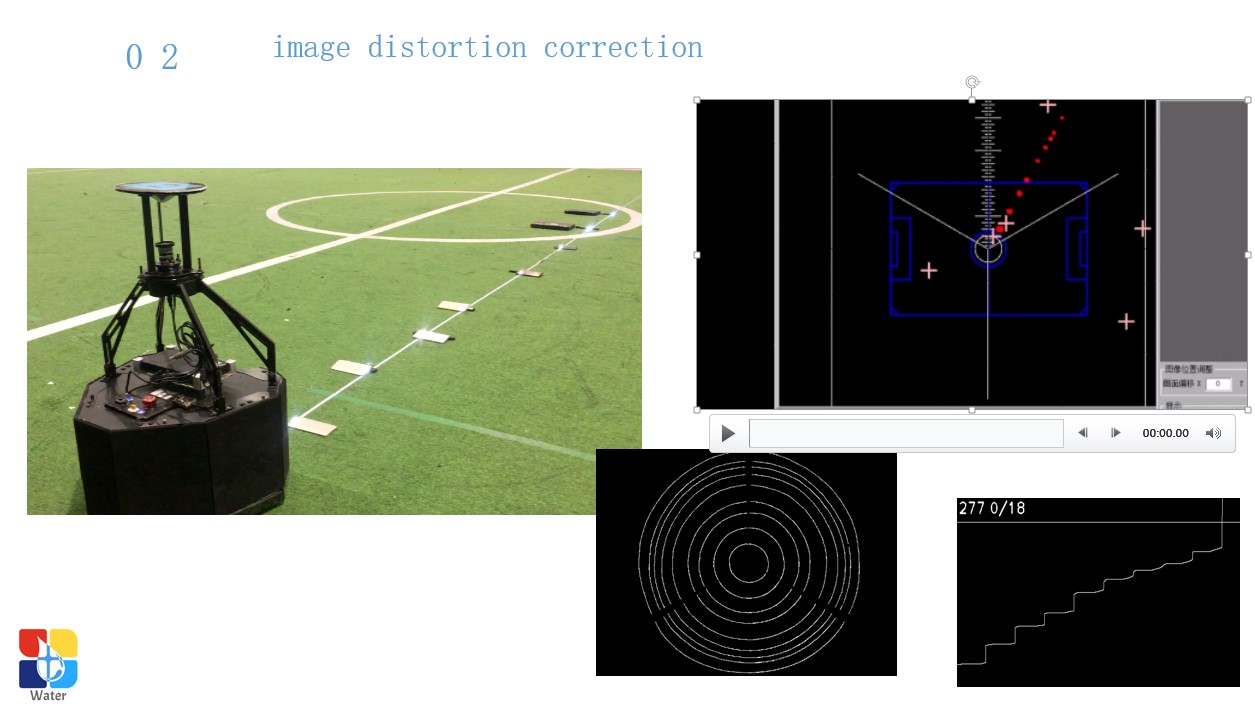
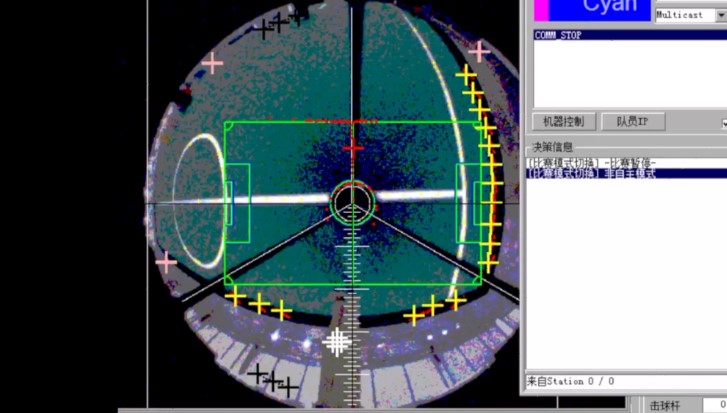
Then we sorted the recorded points by the Euclidean distance from the center and plotted them, and got a step-like distribution map. The classification and filtering of different circles can be completed by identifying these steps.This is the result obtained by the method above. It can be seen that in most cases, the positions of these points are relatively correct, and the self-positioning accuracy of the robot is greatly improved.