Lightweight Wearable Fingertip Haptic Device with 3-DOF Directional Force Feedback based on Fingernail Stimulation
This project started as an IEEE VR 2025 poster and later matured into a full IEEE Transactions on Haptics journal article. The core idea is to deliver directional force feedback through stimulation around the fingernail, so the fingerpad remains unobstructed and can still touch real objects naturally.
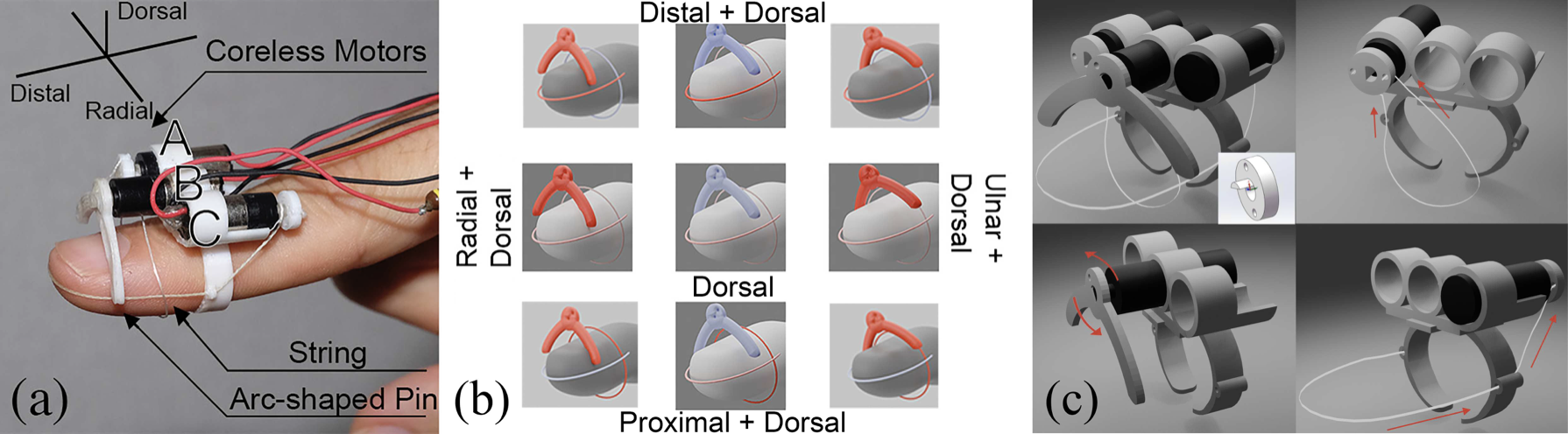
The final journal version presents a 5.24 g wearable fingertip device with three actuation channels. Two string-pulling motors generate distal and proximal cues, while an arc-shaped pin motor provides radial and ulnar stimulation. Together they form a 3-DOF directional interface grounded in the physiology of SA2 mechanoreceptors around the fingernail.
By moving actuation away from the fingerpad, the device preserves natural cutaneous sensation during contact with real-world surfaces. This makes it more suitable for mixed reality and dexterous manipulation than conventional fingertip interfaces that cover the pad directly.
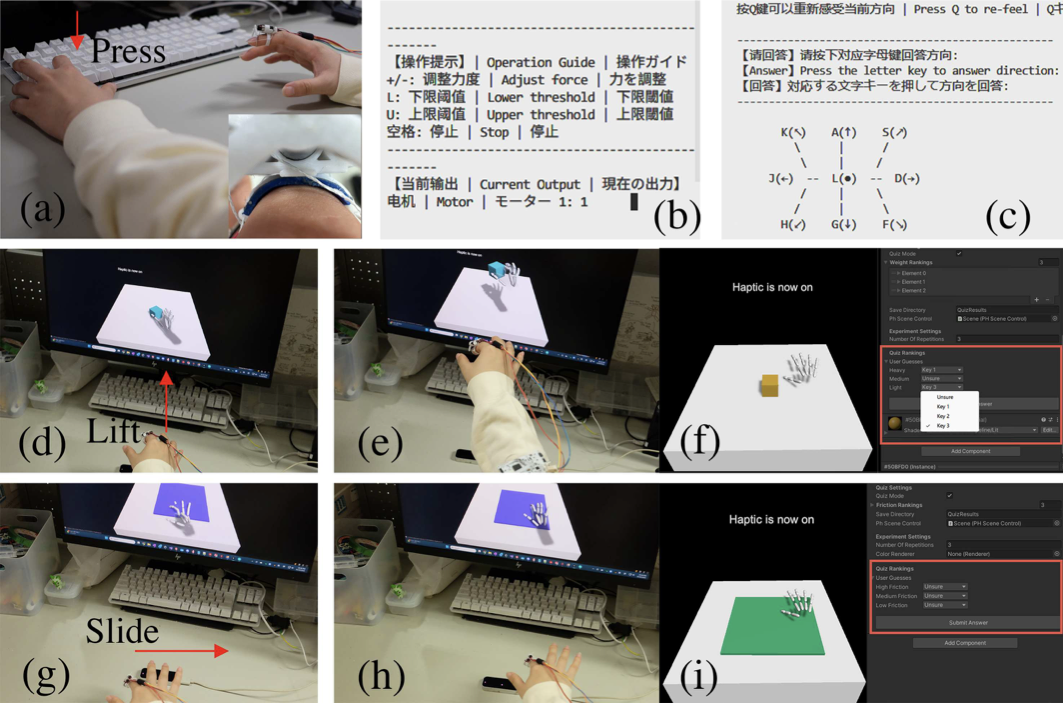
The journal paper expanded the evaluation substantially beyond the earlier poster version. Participants completed direction-recognition, weight-discrimination, friction-discrimination, and subjective-evaluation experiments. The system achieved 63.52% accuracy across nine directional patterns, improved weight and friction discrimination over single-DOF pressure feedback, and was rated higher in overall interaction satisfaction than simpler feedback conditions.
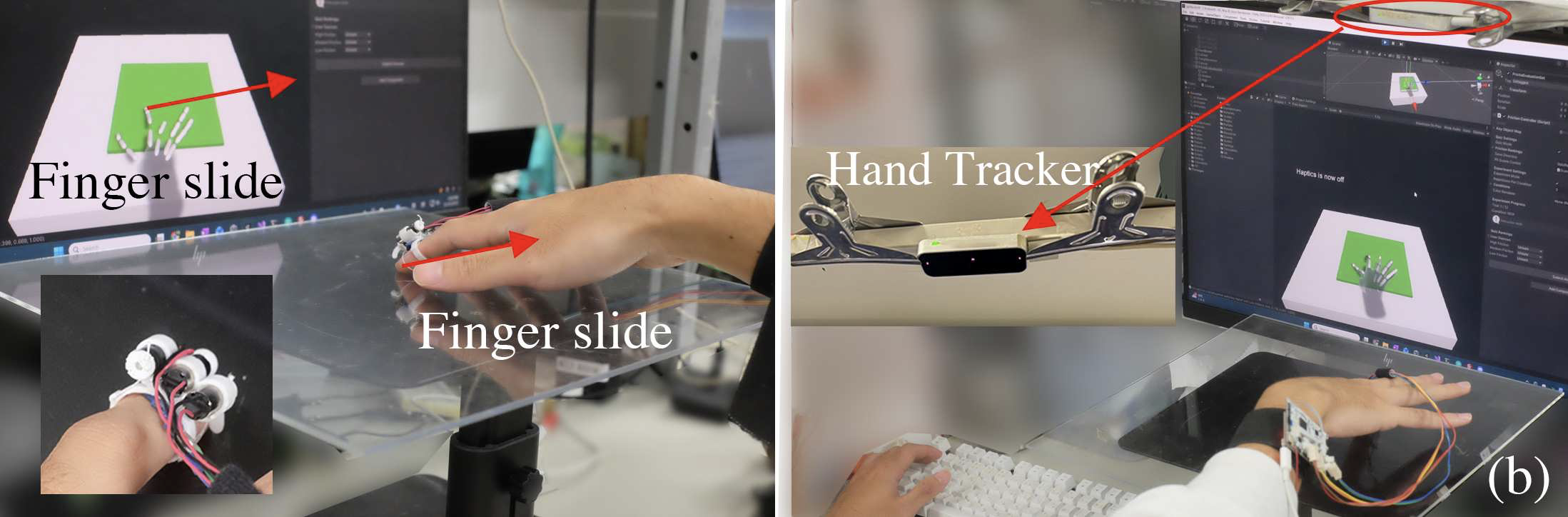
An additional experiment also tested friction perception while the user physically touched an acrylic surface. The 3-DOF feedback remained effective under physical contact, which is important for the mixed-reality use case this device targets.
Publication Details
Journal Article
Published in: IEEE Transactions on Haptics
Online publication date: February 25, 2026
Title: Lightweight Wearable Fingertip Haptic Device with 3-DOF Directional Force Feedback based on Fingernail Stimulation
Authors: Yunxiu Xu, Siyu Wang, Shoichi Hasegawa
DOI: 10.1109/TOH.2026.3668127
Earlier Version
Presented at: 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)
Title: Lightweight Wearable Fingertip Haptic Device with Tangential Force Feedback based on Finger Nail Stimulation
Conference date: March 8-12, 2025
Location: Saint Malo, France
DOI: 10.1109/VRW66409.2025.00278