Lightweight Fingernail Haptic Device: Unobstructed Fingerpad Force and Vibration Feedback
This work develops a lightweight fingertip haptic device that provides force and vibration feedback for virtual object manipulation. The device attaches to fingernails using thin strings and weighs only 1.55g per finger, allowing users to touch real objects while receiving haptic feedback from virtual environments.
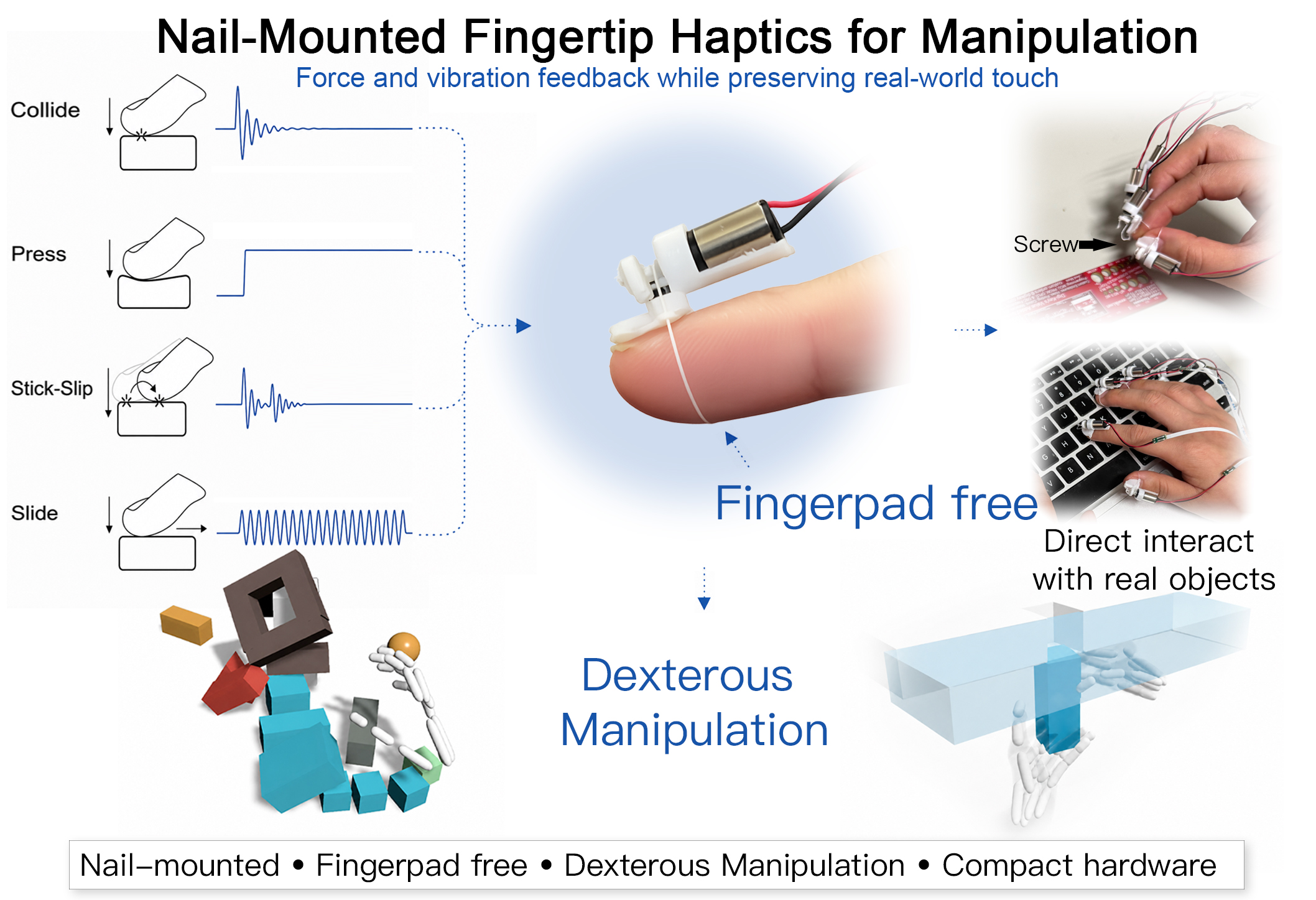
The device uses a coreless motor connected to a string-based transmission system. When manipulating virtual objects, the motor pulls on strings attached to the fingernail to simulate grip forces and collision feedback. The design keeps the fingerpad completely free, so users can still feel real-world textures and objects normally.

The hardware includes a motor pulley system, actuator components, and control circuitry. The transmission element transfers motor motion to the fingernail area through carefully positioned strings. A custom control circuit manages the real-time haptic rendering based on physics simulation data.
We tested the device with users performing various manipulation tasks in virtual environments. Participants could perceive pressure changes and vibration feedback, and their performance in dexterous manipulation tasks improved significantly compared to visual-only conditions. The lightweight design means users can wear the device during daily activities without major interference.
The approach differs from glove-based haptic devices by leaving fingertips unobstructed. This allows for better integration between virtual and real-world interactions, making the device more practical for extended use.
Publication Details
Journal Article
Published in: IEEE Transactions on Haptics (Early Access)
Authors: Yunxiu Xu, Siyu Wang, Shoichi Hasegawa
Date: June 19, 2025
DOI: 10.1109/TOH.2025.3581014
Conference Presentation
This journal work was selected for an oral presentation at ICRA 2026.
Presented at: 2026 IEEE International Conference on Robotics and Automation (ICRA)
Presentation type: Oral
Session: ThAT4.9 — Wearable and Rehabilitation Robotics
Time: 12:20–12:30, Thursday, June 4, 2026
Location: Strauss 1-2, Vienna, Austria
Conference dates: June 1–5, 2026
Impact and Future Work
This research offers a potential solution for designing haptic interfaces that balance lightweight construction, effective haptic feedback for dexterous manipulation, and daily wearability. The work opens new possibilities for seamless integration of haptic technology into everyday life, advancing the field toward more practical and user-friendly haptic interfaces.
The device’s ability to enhance virtual manipulation while preserving real-world tactile experiences represents a significant step forward in haptic technology development, with potential applications in VR/AR, robotics, and human-computer interaction.