Fingernail-Based Tangential Force Simulation for Enhanced Dexterous Manipulation in Virtual Reality
Award
AsiaHaptics 2024 Best Demonstration Award (Bronze)
This study introduces a novel haptic device designed to enhance dexterous manipulation in VR by simulating tangential forces on the fingernail. The device provides tactile feedback by mechanically stimulating mechanoreceptors located on the sides of the fingernail, which are crucial for sensing tangential forces during object manipulation. Unlike traditional haptic devices that often rely on bulky components or electrical stimulation, this system is lightweight and uses mechanical stimulation to deliver more natural and precise tactile sensations.
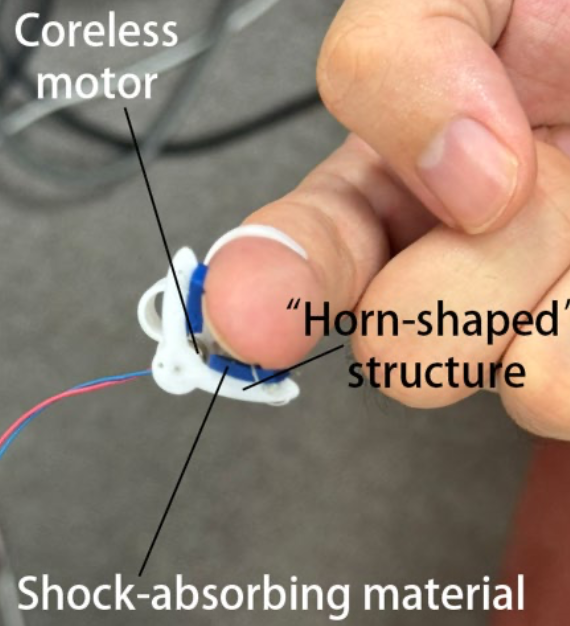
The device utilizes a coreless motor that drives a horn-shaped(or we can say arc-shaped) structure to apply controlled force to the sides of the fingernail. This design maintains the freedom of the fingertip’s movement, enhancing the user’s ability to perform fine motor adjustments in virtual environments.
The study highlights the potential finger-nail side haptic feedback. Future work will focus on improving the device’s directional feedback(3 dot), expanding the range of tasks for evaluation.
This works was demonstrated at [AsiaHaptics 2024].